
Digging into the EVM Object Format (EOF)
The EVM Object Format (EOF) introduces a structured container format for EVM bytecode. The EOF proposal is spread over several EIPs (see the “Mega EOF Endgame” for an overview). My goal here is to provide a high level overview and, in particular, to clarify what problems it is trying to solve.
The EOF proposal was recently presented at the All Core Devs Execution Layer meeting where concerns were raised around its complexity and whether or not it could be ready for Prague (see the slides here). The following comments made during the meeting captures the sentiment:
(1:18:55) “I know the Ipsilon team and Danno have spent a lot of time working on this and it’s quite harsh to say that after all this time we might not be shipping it but I think it’s even worse to say, ‘Let’s see,’ and then in like we push it another two years and then we say, ‘Oh, we are not going to ship it after all.’ and so I think we should make a decision at Devconnect whether this is something that we want”
So, what is the EOF and why is it important? That’s what I want to dig into here. Roughly speaking, the EOF introduces a versioned container format for EVM bytecode which offers a mechanism for managing breaking changes to the EVM.
Overview
The Ethereum Virtual Machine (EVM) was specified as part of the
Yellow Paper and,
more recently, through the Execution Layer
Specification. The EVM
has evolved in many directions. For example, new instructions have
been added (e.g. SHL,
CREATE2,PUSH0,
etc), gas costs have
been
tweaked, a code size limit
has been imposed,
instructions have been
supplanted and even
(hopefully) deprecated.
Allowing the EVM to evolve seems important for the future of Ethereum!
And yet, the nature of EVM bytecode makes this unnecessarily
difficult.
I’m going to give some examples to backup this claim that the current
nature of the EVM hinders its evolution. These examples are not mine:
they are actually part of the EOF proposal. I’m calling them
examples because that’s what I think they are: good examples where
evolving the EVM is currently difficult. There are many other
examples as well. The challenges faced with deprecating
SELFDESTRUCT provide
another
example,
as do
attempts
to
manage
Address Space Expansion.
Immediate Operands
Instructions with immediate operands cannot easily be added to the EVM. Whilst the exact reasons for this are somewhat involved (see Appendix below), the more important question is: why do we want instructions with immediate operands? Whilst this is hard to pin down, two cases are illustrative:
(Static Control Flow). EVM bytecode currently only supports dynamic control flow. Specifically, the
JUMPandJUMPIinstructions accept their branch targets as stack operands. Whilst determining a branch target is often easy (e.g. because it is pushed on the stack immediately beforehand) it can also be impossibly hard (e.g. because it was loaded from storage). As such, decompiling EVM bytecode is a hard problem. This complicates, for example, tools for operating on bytecode (e.g. for static verification) and clients attempting to compile bytecode into efficient machine code (where static branching is used). The idea of introducing static control-flow to the EVM has been raised many times over the years (see e.g. EIP-615, EIP-2315, EIP-3779, EIP-4200, etc). But, none of these proposals can work unless immediate operands are permitted.(Stack Manipulation). A similar issue lies with the stack, as instructions for manipulating the stack (e.g.
SWAP1,SWAP13,DUP16, etc) can only reach sixteen items deep. To support arbitrary numbers of parameters and local variables, compilers use complex maneuvers to shift items around, sometimes spilling them to memory. This results in a discrepancy between the true cost of an operation, and its actual cost in gas (i.e. because some artificial maneuver was required which, on a physical CPU, could have been performed directly). In 2017, EIP-663 was created to address this issue by introducing theDUPNandSWAPNinstructions. The problem is that, without immediate operands, theNmust be supplied as a stack operand. And that means losing the ability to statically analyse the stack (in some sense introducing a similar problem as currently faced for control-flow). As such, EIP-663 has languished until finally being folded into the EOF proposal.
The EOF addresses this in several ways: firstly, it enables
instructions with immediate operands
(EIP3670); secondly, it
replaces dynamic branching instructions (e.g. JUMP) with static
branching instructions (e.g. RJUMP)
(EIP-4200); thirdly, it
introduces instructions for calling subroutines (CALLF, JUMPF,
RETF)
(EIP-4750,-5450,-6206);
finally, it introduces DUPN and SWAPN
(EIP-663).
Gas Observability
On several occasions the gas cost of an existing operation has been tweaked for some reason. Sometimes costs are increased, whilst other times they are decreased. Generally speaking, reducing costs is not considered a breaking change (even though it clearly can be in some cases). However, changes which increase costs are normally considered to be breaking changes.
Examples where costs decreased include:
EIP-1108 (“Reduce alt_bn128 precompile gas costs”). This reduced the cost of the Eliptic Curve precompile contracts after some significant performance optimisations were implemented in Geth.
EIP-1283 (“Net gas metering for
SSTORE”). Originally scheduled for Constantinople, it was discovered to introduce a new kind of reentrancy attack. Specifically, with this EIP, it was possible to write storage using less than2300gas (and, hence, Solidity’smsg.send.transfer()could now do more than just transfer ETH). As a result Constantinople was delayed and EIP-1283 removed (with EIP-2200 eventually replacing it in Instanbul).EIP-2200 (“Structured Definitions for Net Gas Metering”). This introduced a more refined gas metering for
SSTORE(e.g. subsequent writes to the same location are cheaper).EIP-2565 (“ModExp Gas Cost”). This introduced a new algorithm for calculating gas costs for the
ModExpprecompile.
Examples where costs increased include:
EIP-1884 (“Repricing for trie-size-dependent opcodes”). This attempted to rebalance instructions which had become more resource intensive over time. It was acknowledged as a breaking change which could, for example, push default functions over the
2300gas limit (in some cases).EIP-2929 (“Gas cost increases for state access opcodes”). This increased the cost of various instructions (e.g.
SLOAD) on their first use within a transaction. This was to address historical underpricing of storage accessing instructions and ward of potential DoS attacks. Again, this was acknowledged as a breaking change. To mitigate the risk of breaking existing contracts, EIP-2930 (“Optional access lists”) added an entirely new transaction type allowing one to “pre-specify and pre-pay for the accounts and storage slots that the transaction plans to access”.
What seems clear from this is that: (1) changes to the gas schedule will be ongoing (e.g. as CPU/GPU characteristics change or algorithmic performance increases, etc); (2) such changes will continue to cause problems unless some new mechanism for managing them is introduced.
To address these concerns, the EOF proposal includes a goal of removing gas observability. What does this mean? Well, consider a hypothetical contract containing something like this:
...
GAS
PUSH 0xffffffff5795
EQ
...
Since the equality check (EQ) depends upon the exact gas available
at a specific point, changes to the gas schedule (e.g. increasing the
costs of SSTORE) could impact the outcome. A complete contract
illustrating this is
here
which, on Shanghai, executes to STOP. In contrast, on Istanbul it
executes to
INVALID.
Yes, this is a very artificial example! Yes, people should never
write code like this! But, there are some situations where things
like this arise. For example, Solidity uses a default stipend of
2300 gas for transfer() calls. Furthermore, stipends sometimes
are deducted manually with
code
like
staticcall(gas()-2000,...).
Removing gas observability would allow the gas schedule to change more
easily with minimal impact. The challenges faced with SSTORE are a
key motivator here. However, to actually do this means dropping
instructions that expose gas costs. Specifically: GAS, CALL,
CALLCODE, DELEGATECALL, STATICCALL, CREATE, and CREATE2.
This would be a significant breaking change which would be hard to do
without EOF (or something like it). The EOF handles this by: firstly,
replacing the first five instructions above with: CALL2,
STATICCALL2, DELEGATECALL2
(EIP-7069); secondly, by
replacing CREATE / CREATE2 with CREATE3 / CREATE4 (EIP-TBC).
Code Observability
This is an ambitious part of the EOF proposal but is also something
Vitalik makes a strong case
for.
The goal is to allow on-chain contracts to be safely and automatically
upgraded (e.g. to exploit new instructions). For example, contracts
using PUSH1 0x0 could now be upgraded to use PUSH0. That would
be very neat!
As with gas observability, the key challenge here lies with instructions that can observe the bytecode of a contract. That is, if the logic of a contract depends on the exact bytecode of another (or itself), then changing that bytecode (i.e. through automated upgrading) could potentially alter its execution. Instructions which can observe a contract’s bytecode include:
CODESIZE,CODECOPY,EXTCODESIZE,EXTCODECOPY,EXTCODEHASH. These allow a contract to observe the bytecode of another contract (either the enclosing contract or an external contract).CREATE/CREATE2. These create a new contract using initcode typically sourced from the (data) bytes of a contract. In such cases, they specify an exact region of the contract’s bytecode to use. As such, their behaviour can be affected by changes to the enclosing contract’s bytecode (i.e. if this region changes size or position).
Additionally, CREATE2 poses another potential hazard since the new
contract address is (partly) determined by the bytecode of the
contract created. Thus, if our automatic upgrading system also
upgrades as-yet-undeployed initcode, then this would in turn alter the
final contract address. Any existing contract which relied on an
exact address (for whatever reason) would then break.
Eliminating code observability requires, at a minimum, that the above
instructions are replaced with alternatives. Again, this would be a
fairly significant breaking change. The EOF addresses this in several
ways: firstly, a specific data section is introduced
(EIP-3540); secondly,
operations (DATALOAD, DATASIZE, etc) for accessing it are
introduced (EIP-7480);
finally, CREATE / CREATE2 are replaced with CREATE3 / CREATE4
/ RETURNCONTRACT (EIP-TBC).
Evolution
We should also consider how evolution under EOF might look. We can
assume the legacy EVM will be needed to execute existing on-chain
contracts. Thus, new EOF contracts and legacy EVM contracts will
co-exist. To further evolve the EVM, new EOF versions (e.g. EOFv2)
will be released and, thus, older EOF contracts (e.g. EOFv1) will
coexist with newer ones. The rate of new EOF versions, however,
should be fairly low (e.g. a new version every 5-10 years). Remember
that a new EOF version is only necessary for breaking changes.
Thus, non-breaking changes can be automatically added to the current
EOF version.
Naturally, all this raises questions around the burden of maintaining multiple EVM variants (Vitalik talks specifically about this). The cost of maintaining a particular EOF version presumably depends on its nature. For example, a version which only changes gas costs should be fairly easy to maintain (i.e. assuming the gas schedule is a configuration parameter). Likewise, a version which adds or removes new instructions may be relatively low cost (i.e. by configuring which instructions are enabled / disabled in a particular version). Finally, when code observability is abolished, it might even be possible to deprecate EOF versions (i.e. by automatically upgrading contracts for a given version to a more recent version).
Conclusion
Evolving the legacy EVM is proving to be increasingly difficult as time goes on. There is talk of the EVM ossifying to the point where its evolution in certain directions stalls. Of course, non-breaking changes will always continue (e.g. adding new instructions, new precompiles, etc). Its the breaking changes that become harder and harder (e.g. removing an instruction, increasing gas costs, etc). The real benefit of EOF comes from versioning: we can have multiple bytecode versions “in flight” at the same time. There are concerns this could lead to a glut of different versions on chain. But, the fact is, we are already living in this world. Whenever a change is made which could break existing code (e.g. changing gas costs, deprecating instructions, imposing new limits, etc), we effectively create a new version of bytecode. The only difference is how we manage it: either in an ad-hoc fashion (as is done now); or, with a more structured mechanism (as with EOF).
Acknowledgements. Thanks to Danno Ferrin for pointing out some missing bits of the history in an earlier draft of this article!
Appendix — Immediate Operands
As discussed above, we cannot easily add instructions with immediate operands to the EVM. The purpose here is just to clarify what the problem is. The relevant points for our discussion are:
Bytecode is Unstructured. An EVM bytecode program is just a collection of bytes with (almost) no other structured imposed. Execution begins with the first instruction at offset
0. Some bytes represent instructions, some bytes can represent data and some bytes can simply be “dead code”. Determining whether or not a given byte is part of an instruction, is unused or represents data is not at all straightforward. The solidity compiler, for example, appends metadata to the end of a contract’s bytecode.Mostly No Immediates. Unlike many other bytecode formats (e.g. JVM Bytecode), EVM instructions generally do not take immediate operands and, instead, operands are supplied on the stack. The only exception here are the
PUSHXXinstructions which allow constants to be loaded on the stack.Jump Destinations. Every branch in an EVM bytecode program must land at a
JUMPDESTinstruction (opcode0x5b), otherwise a runtime exception is raised. Furthermore, branches must land on instruction boundaries (i.e. not on bytes within the immediate operand of another instruction).
Let’s consider a simple (but currently valid) sequence of EVM
bytecode: 0x600456e05b00. This corresponds to the following
assembly:
push1 lab
jump
db 0xe0
lab:
jumpdest
stop
Observe that the raw data byte 0xe0 is mixed in with other
instructions (which is permitted under the current EVM specification).
The EVM simply views this as an INVALID
instruction
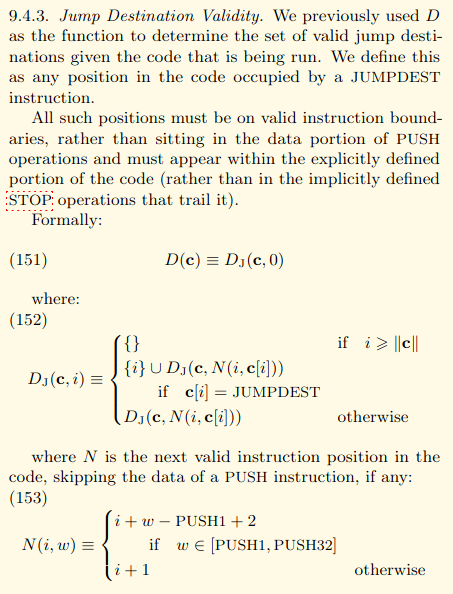
which has no operands. Specifically, as defined in Section 9.4.3
(“Jump Destination Validity”) of the Yellow
Paper:
Now, let us consider
EIP-4200 which adds a new
instruction RJUMP taking a two-byte immediate operand. Funnily
enough, the opcode of RJUMP is 0xe0. So, what’s the problem?
Well, our bytecode sequence now looks like this:
push1 0x4
jump
rjump 0x5b00
Observe how the JUMPDEST and STOP bytecodes are now bytes within
the immediate operand of the RJUMP instruction! This has completely
changed the meaning of our original program, and its not clear how to
fix this. We could try to make an exception for RJUMP and allow
legacy branches into its immediate opcode bytes (i.e. so the above
retains its original meaning). But, this makes disassembling bytecode
contracts much harder! Furthermore, we can now write bytecode
programs which do this on purpose. At that point, a given byte can be
interpreted as a different instruction depending on the PC of the
executing EVM. That is not ideal!
A final point worth noting is that we can still introduce instructions
such as RJUMP when we know they don’t actually break anything.
Essentially, we could analyse mainnet to check whether any bad
situations (such as above) actually exist. If not, then we’re good to
go! Or, if they do exist, we could repeat the analysis for a
different opcode value (e.g. 0xe1 in this case). This kind of
approach has been used before (e.g. for the 0xEF marker
opcode), however its unclear
how well it would work in this case. Furthermore, as more contracts
are deployed and as more instructions are added to the EVM, it gets
harder and harder to successfully apply this technique. Thus, even if
this could be used for adding RJUMP, its not a long term solution.